|
基于足底压力测量技术的人体运动意图判定方法研究
OUTLINE
* Background
* System introduction
* Calculation
* Results
* Conclusion
BACKGROUND
* 平衡功能——处于某种姿势或稳定状态下,当运动或受到外力作用时,人体自动调整并维持姿势的能力
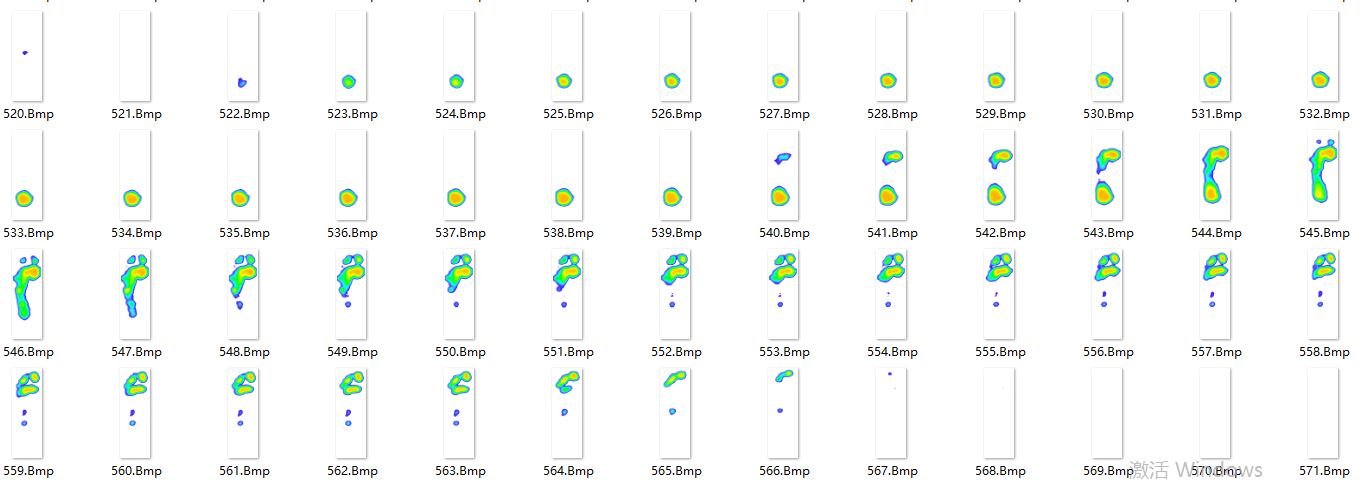
* 足底压力的变化反应了人体姿势变化
* 足部结构发生病变或者解剖特征发生变化时,人体的平衡功能将受到显著的影响,足底压力就会发生相应的变化
BACKGROUND
BACKGROUND
BACKGROUND
* 集总力和分布力
• 集总力:六维传感器( 𝑀𝑍、 𝑀𝑦、 𝑀𝑥、 𝐹𝑧、 𝐹𝑦、 𝐹𝑥)
• 分布力:压力垫(铺有60×21的带状导体的薄膜)
SYSTEM INTRODUCTION
SYSTEM INTRODUCTION
SYSTEM INTRODUCTION
SYSTEM INTRODUCTION
CALCULATION
* 足底压力中心(COP)的计算
• 利用集总力数据计算COP
• 𝐶𝑂𝑃_𝑋1= 𝑀𝑦 𝐹𝑧
• 𝐶𝑂𝑃_𝑌1= 𝑀𝑋 𝐹𝑍
– D. Lafond, M. Duarte, F. Prince. Comparison of three methods to estimate the center of mass during balance assessment [J]. Journal of Biomechanics 2004, 37: 1421–1426
• 利用分布力数据计算COP
• 𝐶𝑂𝑃_𝑋2= 𝑝𝑟𝑒𝑠𝑠𝑢𝑟𝑒 𝑥𝑖, 𝑦𝑖∗ 𝑥𝑖𝑝𝑟𝑒𝑠𝑠𝑢𝑟𝑒 𝑥𝑖, 𝑦𝑖
• 𝐶𝑂𝑃_𝑌2= 𝑝𝑟𝑒𝑠𝑠𝑢𝑟𝑒 𝑥𝑖, 𝑦𝑖∗ 𝑦𝑖𝑝𝑟𝑒𝑠𝑠𝑢𝑟𝑒 𝑥𝑖, 𝑦𝑖
– Tai Ryoon Han, Nam Jong Paik, Min Sik Im. Quantification of the path of center of pressure (COP) using an F-scan in-shoe transducer [J]. Gait and Posture 1999, 10: 248–254.
CALCULATION
* 压力垫与测力台系统COP估计一致性评估
RESULT
* 压力垫与测力台系统COP估计一致性评估
CONCLUSION
* 利用压力垫分布力的计算结果与利用测力台集总力的计算结果具有较高的一致性和相关性
* 压力垫分布力亦可以准确地反映出人体足底压力中心的偏移情况,从而为穿戴式人体平衡状态评估和判断运动意图提供十分有力的支持
* 这种可穿戴式的测量为动态平衡功能评定及助力行走外骨骼机器人的运动规划及控制提供了一种有效的测量手段
人体坐压测量系统
|